
Samedi 4 Janvier - Mesures du flux de chaleur
(Francis Lucazeau, Frédérique Rolandone, Thibauld Pichot et Jean-Frédéric Lebrun)
La répartition de la température au sein de la plaque plongeante est un paramètre important pour étudier les zones sismogénes (les régions susceptibles de générer des séismes). La seconde partie de cette mission est donc dédiée à la structure thermique du segment Nord de la zone de subduction des Petites Antilles. Une première série de mesures alignées sur un profil NE-SO a été effectuée au Nord de l’île de Barbuda depuis l’avant-arc jusqu’à la croûte océanique de la plaque Amérique du Nord en passant par la fosse de subduction. Une seconde série de mesures ont été rélaisées à l’Est de la Guadeloupe et de la Martinique sur la plaque plongeante dans la région des rides de Barracuda et de Tiburon. Enfin une dernière série de mesures a été acquise le long d’un profil NE-SO au large de la Martinique depuis le front de déformation jusqu’à la partie supérieure de la marge (Figure 1).
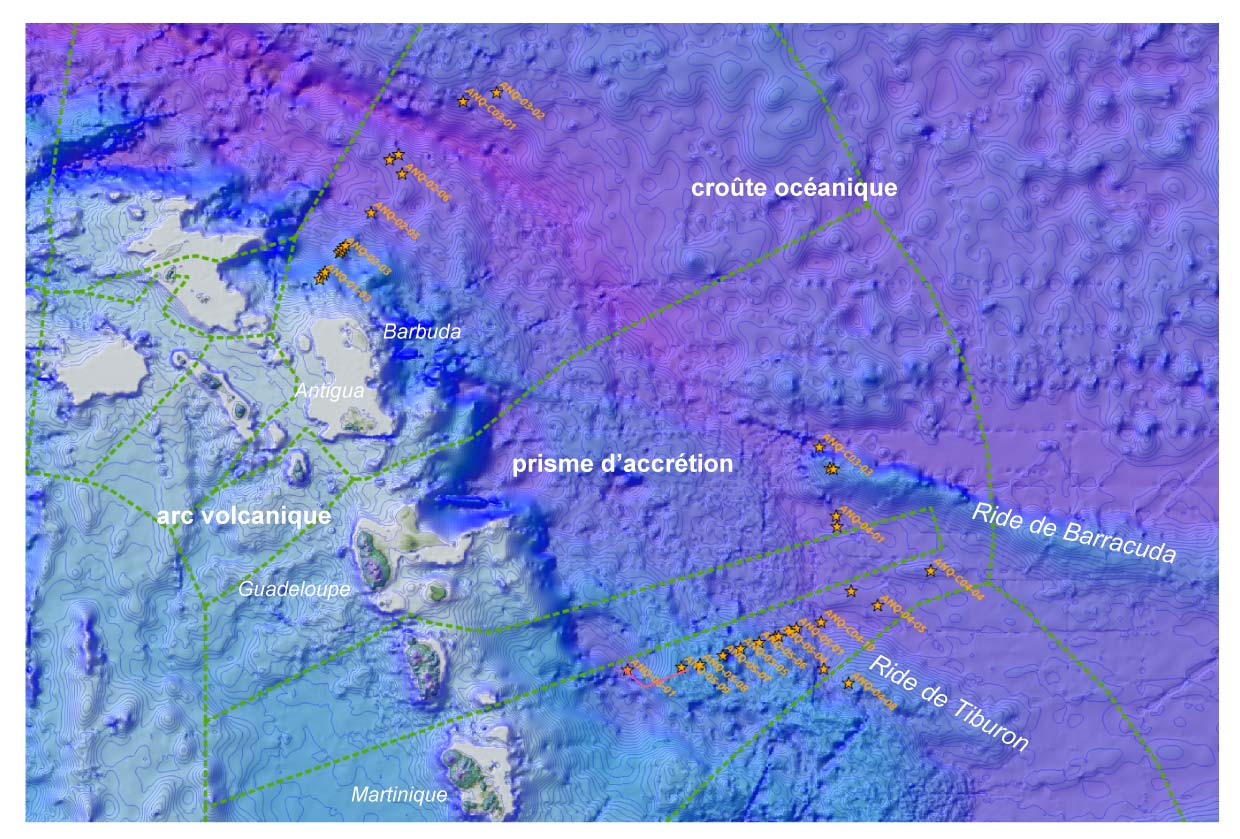
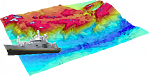
Figure 1.Sites de mesures du flux de chaleur (étoiles orange) acquis au cours de la seconde partie de la campagne Antithesis à bord du N/O « Pourquoi Pas ? ».
Le flux de chaleur enregistré en surface rend compte du transfert de chaleur du manteau terrestre, des roches de la croûte qui produisent de la chaleur par radioactivité et des effets thermiques des perturbations magmatiques et tectoniques. Ce flux de chaleur est calculé en fonction du gradient de température mesuré dans les sédiments et de la conductivité thermique de ces sédiments. Il s’exprime en mW/m2.
Il est donc nécessaire de connaître deux variables, la température dans les sédiments à différente profondeur et la conductivité thermique (capacité d’un milieu à conduire la chaleur) de ces sédiments.
Principe de la mesure du flux de chaleur :
La mesure du flux de chaleur s’effectue en utilisant un tube métallique de 4 mètres de long qui est lesté de 1,3 tonnes de plomb et équipé de 6 capteurs thermiques répartis le long du tube (Figure 2). Cette sonde, nommée POGO, mesure la température in situ au niveau de chacun des capteurs ce qui permet de calculer le gradient thermique le long des 4 premiers mètres de sédiment au fond de la mer.
Une fois le bateau arrivé sur le site de mesure, la sonde est descendue à 50 m au-dessus du fond de la mer à l’aide du treuil (Figure 2). Les capteurs vont s’équilibrer avec la température de l’eau qui est au alentour de 2°C.
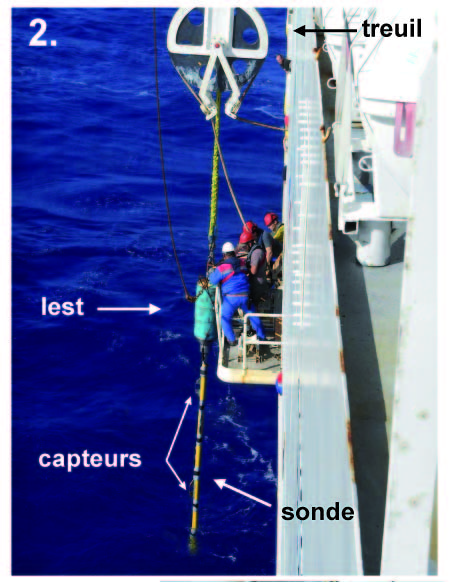
Figure 2. Mise à l’eau de la sonde POGO.
Ensuite le POGO sera enfoncé dans les sédiments sous son propre poids grâce au lest fixé en haut de la sonde. Lors de la pénétration de la sonde, les sédiments subissent un échauffement lié aux forces de friction, la température s’élève (c’est le premier pic sur le graphique de la figure 3).
Puis la température va redescendre et s’équilibrer en fonction de la température du sol à la profondeur de la sonde. C’est le plateau (figure 3). C’est la température du plateau qui permettra le calcul du gradient. Il faut donc attendre 10 minutes pour être certain que la température plateau soit bien atteinte.
Le grand avantage du POGO est qu’il est possible dans un troisième temps de chauffer les sédiments en contact avec la sonde (courbe de chauffage sur la figure 3). Par cette méthode, on peut déterminer in situ la conductivité thermique des sédiments, le second paramètre essentiel pour le calcul du flux de chaleur.
Une fois les mesures du gradient de température et de la conductivité thermique effectuées, on procède à l’arraché de la sonde puis on peut passer à un autre point de mesure un peu plus loin.
Figure 3. Logiciel d’acquisition permettant de suivre en temps réel l’acquisition des données enregistrées à intervalle de temps régulier par les 6 capteurs thermiques fixés à la sonde (fenêtre de gauche). Graphique représentant les valeurs de température enregistrées par les 6 capteurs pendant l’ensemble de la période de mesure (fenêtre de droite). On retrouve ainsi le pic de température dû au planté de la sonde, suivit par le plateau et la courbe de chauffage et enfin l’arraché.
Le fonctionnement de l’instrument
Le POGO est un instrument autonome, il y a dans le lest toute l’électronique nécessaire à l’acquisition des données, à leur enregistrement et des batteries pour l’électricité.
En plus le POGO est équipé d’un transducteur pour communiquer par onde acoustique avec les ordinateurs de commande installés dans un laboratoire du bateau. Il faut pour cela un second transducteur sur le bateau (Figure 4) pour échanger avec l’instrument au fond de la mer. Ce second transducteur est descendu sous le bateau dans un puits qui traverse la coque (Figure 5). Ainsi rien ne perturbe la communication avec l’instrument.

Figure 4. Transducteur qui permet d’assurer la connexion par onde acoustique entre la sonde au fond de l’eau et le bateau. Figure 5. Puits dans lequel est déposé le transpondeur.
Grâce à ce système de communication, le POGO au fond de la mer peut être commandé et il peut transmettre en temps réel les données qu’il acquière. Il est donc inutile de le remonter sur le bateau après chaque mesure pour récupérer ses données.